|
CMSIS-RTOS2
Version 2.1.3
Real-Time Operating System: API and RTX Reference Implementation
|
|
CMSIS-RTOS2
Version 2.1.3
Real-Time Operating System: API and RTX Reference Implementation
|
Synchronize resource access using Mutual Exclusion (Mutex). More...
Data Structures | |
| struct | osMutexAttr_t |
| Attributes structure for mutex. More... | |
Macros | |
| #define | osMutexRecursive 0x00000001U |
| Recursive mutex. More... | |
| #define | osMutexPrioInherit 0x00000002U |
| Priority inherit protocol. More... | |
| #define | osMutexRobust 0x00000008U |
| Robust mutex. More... | |
Typedefs | |
| typedef void * | osMutexId_t |
Functions | |
| osMutexId_t | osMutexNew (const osMutexAttr_t *attr) |
| Create and Initialize a Mutex object. More... | |
| const char * | osMutexGetName (osMutexId_t mutex_id) |
| Get name of a Mutex object. More... | |
| osStatus_t | osMutexAcquire (osMutexId_t mutex_id, uint32_t timeout) |
| Acquire a Mutex or timeout if it is locked. More... | |
| osStatus_t | osMutexRelease (osMutexId_t mutex_id) |
| Release a Mutex that was acquired by osMutexAcquire. More... | |
| osThreadId_t | osMutexGetOwner (osMutexId_t mutex_id) |
| Get Thread which owns a Mutex object. More... | |
| osStatus_t | osMutexDelete (osMutexId_t mutex_id) |
| Delete a Mutex object. More... | |
Mutual exclusion (widely known as Mutex) is used in various operating systems for resource management. Many resources in a microcontroller device can be used repeatedly, but only by one thread at a time (for example communication channels, memory, and files). Mutexes are used to protect access to a shared resource. A mutex is created and then passed between the threads (they can acquire and release the mutex).
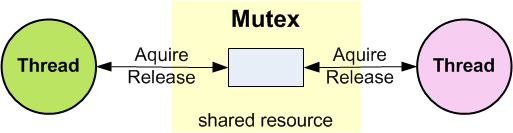
A mutex is a special version of a semaphore. Like the semaphore, it is a container for tokens. But instead of being able to have multiple tokens, a mutex can only carry one (representing the resource). Thus, a mutex token is binary and bounded, i.e. it is either available, or blocked by a owning thread. The advantage of a mutex is that it introduces thread ownership. When a thread acquires a mutex and becomes its owner, subsequent mutex acquires from that thread will succeed immediately without any latency (if osMutexRecursive is specified). Thus, mutex acquires/releases can be nested.
| struct osMutexAttr_t |
Specifies the following attributes for the osMutexNew function.
| Data Fields | ||
|---|---|---|
| const char * | name |
name of the mutex Pointer to a constant string with a human readable name (displayed during debugging) of the mutex object. Default: NULL no name specified. |
| uint32_t | attr_bits |
attribute bits The following bit masks can be used to set options:
Use logical 'OR' operation to select multiple options, for example: Default: 0 which specifies:
|
| void * | cb_mem |
memory for control block Pointer to a memory for the mutex control block object. Refer to Static Object Memory for more information. Default: NULL to use Automatic Dynamic Allocation for the mutex control block. |
| uint32_t | cb_size |
size of provided memory for control block The size (in bytes) of memory block passed with cb_mem. For RTX, the minimum value is defined with osRtxMutexCbSize (higher values are permitted). Default: 0 as the default is no memory provided with cb_mem. |
| #define osMutexRecursive 0x00000001U |
Recursive flag in osMutexAttr_t.
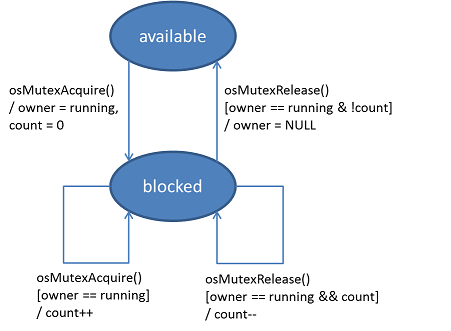
The same thread can consume a mutex multiple times without locking itself. Each time the owning thread acquires the mutex the lock count is incremented. The mutex must be released multiple times as well until the lock count reaches zero. At reaching zero the mutex is actually released and can be acquired by other threads.
Code Example
| #define osMutexPrioInherit 0x00000002U |
Priority inheritance flag in osMutexAttr_t.
A mutex using priority inheritance protocol transfers a waiting threads priority to the current mutex owner if the owners thread priority is lower. This assures that a low priority thread does not block a high priority thread.
Otherwise a low priority thread might hold a mutex but is not granted execution time due to another mid priority thread. Without priority inheritance the high priority thread waiting for the mutex would be blocked by the mid priority thread, called priority inversion.
Code Example
This example reveals a blocked high priority thread if osMutexPrioInherit is removed.
During the first second the high and mid priority threads are delayed. Thus the low priority thread can start its work, acquires the mutex and delays while holding it.
After the first second the high and mid priority threads become ready. Thus the high priority thread gets precedence and tries to acquire the mutex. Because the mutex is already owned by the low priority thread the high priority thread gets blocked.
Finally the mid priority thread gets executed and start doing a lot of non-blocking stuff, i.e. it does not call any blocking RTOS functionality.
Without osMutexPrioInherit we would stuck here forever. Even if the low priority thread gets ready after 5s. Due to its low priority the mid priority thread always gets precedence. The effect called priority inversion leads to the mid priority thread blocking the high priority thread indirectly.
Using osMutexPrioInherit as shown in the example code we get rid of this situation. Due to the priority inheritance protocol the low priority thread inherits the high priority while holding the mutex. Thus the low priority thread gets precedence over the mid priority thread until it release the mutex. On osMutexRelease the high priority thread get ready and is scheduled immediately.
| #define osMutexRobust 0x00000008U |
Robust flag in osMutexAttr_t.
Robust mutexes are automatically released if the owning thread is terminated (either by osThreadExit or osThreadTerminate). Non-robust mutexes are not released and the user must assure mutex release manually.
Code Example
This example reveals a blocked mutex if osMutexRobust is removed.
Due to osMutexRobust the mutex gets released automatically. A non-robust mutex would stay locked and cannot be released anymore.
| osMutexId_t osMutexNew | ( | const osMutexAttr_t * | attr | ) |
| [in] | attr | mutex attributes; NULL: default values. |
The function osMutexNew creates and initializes a new mutex object and returns the pointer to the mutex object identifier or NULL in case of an error. It can be safely called before the RTOS is started (call to osKernelStart), but not before it is initialized (call to osKernelInitialize).
The parameter attr sets the mutex object attributes (refer to osMutexAttr_t). Default attributes will be used if set to NULL.
Code Example
| *const char * osMutexGetName | ( | osMutexId_t | mutex_id | ) |
| [in] | mutex_id | mutex ID obtained by osMutexNew. |
The function osMutexGetName returns the pointer to the name string of the mutex identified by parameter mutex_id or NULL in case of an error.
| osStatus_t osMutexAcquire | ( | osMutexId_t | mutex_id, |
| uint32_t | timeout | ||
| ) |
| [in] | mutex_id | mutex ID obtained by osMutexNew. |
| [in] | timeout | Timeout Value or 0 in case of no time-out. |
The blocking function osMutexAcquire waits until a mutex object specified by parameter mutex_id becomes available. If no other thread has obtained the mutex, the function instantly returns and blocks the mutex object.
The parameter timeout specifies how long the system waits to acquire the mutex. While the system waits, the thread that is calling this function is put into the BLOCKED state. The parameter timeout can have the following values:
Possible osStatus_t return values:
Code Example
| osStatus_t osMutexRelease | ( | osMutexId_t | mutex_id | ) |
| [in] | mutex_id | mutex ID obtained by osMutexNew. |
The function osMutexRelease releases a mutex specified by parameter mutex_id. Other threads that currently wait for this mutex will be put into the READY state.
Possible osStatus_t return values:
Code Example
| osThreadId_t osMutexGetOwner | ( | osMutexId_t | mutex_id | ) |
| [in] | mutex_id | mutex ID obtained by osMutexNew. |
The function osMutexGetOwner returns the thread ID of the thread that acquired a mutex specified by parameter mutex_id. In case of an error or if the mutex is not blocked by any thread, it returns NULL.
| osStatus_t osMutexDelete | ( | osMutexId_t | mutex_id | ) |
| [in] | mutex_id | mutex ID obtained by osMutexNew. |
The function osMutexDelete deletes a mutex object specified by parameter mutex_id. It releases internal memory obtained for mutex handling. After this call, the mutex_id is no longer valid and cannot be used. The mutex may be created again using the function osMutexNew.
Possible osStatus_t return values:
Code Example

